Mecanum
data class MecanumKinematics @JvmOverloads constructor(val trackWidth: Double, val lateralMultiplier: Double = 1.0)
Content copied to clipboard
Parameters
track
distance between wheels on opposite sides; see the diagram below 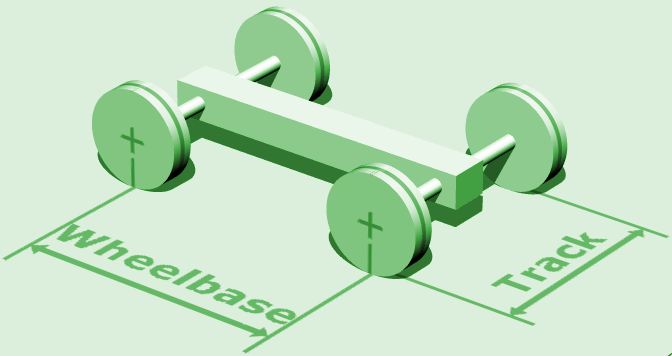
lateral
factor that multiplies strafe velocity to compensate for slip; increase it to boost the distance traveled in the strafe direction
Constructors
Link copied to clipboard
fun MecanumKinematics( trackWidth: Double, wheelbase: Double, lateralMultiplier: Double = 1.0)
Content copied to clipboard
Link copied to clipboard
fun MecanumKinematics(trackWidth: Double, lateralMultiplier: Double = 1.0)
Content copied to clipboard
Types
Functions
Link copied to clipboard
fun <Param> forward(w: MecanumKinematics.WheelIncrements<Param>): Twist2dIncrDual<Param>
Content copied to clipboard
Link copied to clipboard
fun <Param> inverse(t: Twist2dDual<Param>): MecanumKinematics.WheelVelocities<Param>
Content copied to clipboard