Tuning #
This guide details the steps necessary to adapt the quickstart to your robot. To aid in this process, the quickstart comes with several automated tuning routines that hopefully speed up the process. Many of the tuning tools also publish data to FTC Dashboard for debugging.
This procedure must be repeated anytime the robot changes significantly (e.g., a heavy arm is added). If pre-competition autonomous preparation is tight, consider practicing the tuning procedure a couple times beforehand to ensure things go smoothly.
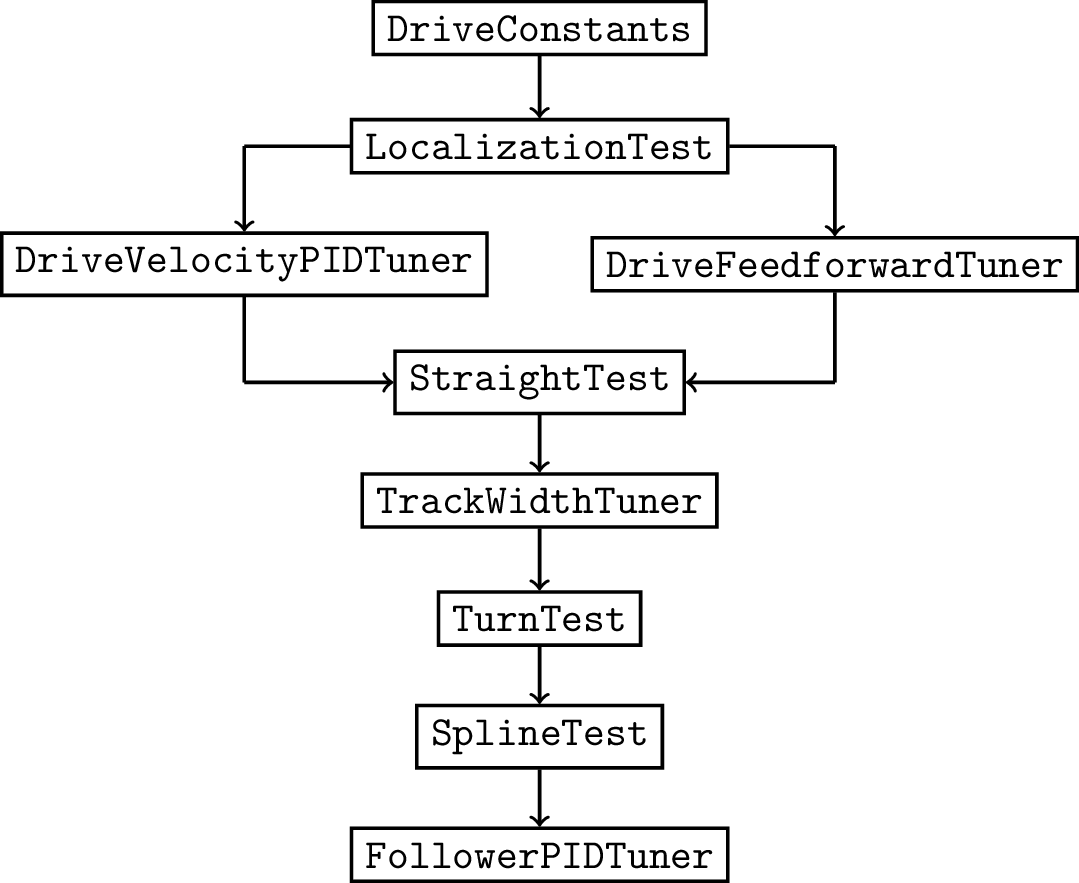
The subsections below should be followed in order. In general, mistakes/errors in earlier items may affect later items; if a problem is discovered in a previous step, it’s best to repeat all of the steps after it. For this reason, it is imperative to verify completion of each step before moving on (if possible) and be as methodical and systematic as possible.
Upgrade Firmware #
Upgrade the firmware of all REV hubs to version 1.8.2. This update contains numerous improvements that materially affect Road Runner’s performance including better DC motor output linearity, closed-loop control, and I2C speeds. The firmware and instructions for flashing can be found here.
Drive Class #
Read through the entirety of DriveConstants. Some of the parameters can be filled in based on your physical robot. Others will be tuned or adjusted later on.
Select a drive class from the org.firstinspires.ftc.teamcode.drive package and fill in all applicable items marked // TODO (it may be helpful to delete the comments when you’re completely done to keep track).
Errors at this stage often manifest themselves as obvious errors in subsequent tests. For instance, the robot may report driving 30in but it drove 60in instead. Large or multiplicative discrepancies are almost always related to the drive constants.
Localization Test #
Run LocalizationTest and the drive the robot around the field with the gamepads. Make sure that the robot’s pose estimate corresponds with reality. While small errors may be attributed to intrinsic inaccuracy of the localizer, large errors are indicative of improper drive/localizer constants. It’s important to discover these configuration errors early and fix them before proceeding prematurely.
Drive Velocity PID #
Skip this step if not using the built-in velocity PID.
It’s recommended that you take advantage of the built-in motor velocity PID (i.e., RUN_USING_ENCODER) if you have encoders on your drive motors. If you decide to use the built-in PID, it’s important to tune the coefficients for your robot (this is especially true for drivetrains which often have higher loads than other actuators). Run DriveVelocityPIDTuner and adjust the PID gains with the dashboard to minimize the error as best you can (note: the tuning variable will not appear until the op mode finishs initializing). Here is a rough procedure:
- Increase kP until any phase lag is eliminated. Concurrently increase kD as necessary to mitigate oscillations.
- Add kI (or adjust kF) until the steady state/constant velocity plateaus are reached.
- Back off kP and kD a little until the response is less oscillatory (but without lag).
Fill in DriveConstants.MOTOR_VELO_PID with the new coefficients when you’re finished.
Drive Characterization #
Skip this step if using the built-in velocity PID.
To find kV and kStatic, the robot executes a quasi-static ramp test where the power is slowly ramped up to minimize acceleration (it’s effectively zero). Throughout this procedure, the velocity and power are recorded. In the corresponding velocity vs. power graph, kV is the slope and kStatic is the y-intercept. Next, to find kA, the robot attempts to accelerate rapidly from rest. This time, the acceleration, velocity, and power are recorded. The velocity is used to determine the acceleration-only power. The acceleration is then graphed against this new power, and the resulting slope is kA.
This procedure is implemented in AutomaticFeedforwardTuner. The DS telemetry prompts will guide you through the process. If you want to do some analysis yourself, the tuner also saves the data to /sdcard/RoadRunner on the RC.
Straight Test #
To test the first few steps, run StraightTest. If the robot lands within a few inches of the target, these steps were successful. If not, repeat the procedures or consider the possibility of an incorrect drive constant (especially if using the built-in motor velocity PID). If this is still unsuccessful,you are free to adjust the parameters (i.e., kV, kA, and kStatic in DriveConstants) slightly to get closer to the goal (keep in mind that feedback will be added later).
Drive Track Width #
Although track width is a physical quantity, different rotation behavior may be observed due to scrub and other effects. To account for this, TrackWidthTuner computes an empirical track width that is better suited for feedforward.
If you have problems with the automated tuner, you can try adjusting the track width by hand using TurnTest. If you decide to do this, make sure to test a variety of angles; it’s more important that the value works OK across different angles than it works perfectly for a single angle.
Turn Test #
Run TurnTest. If the robot is relatively close to the target for a variety of angles, you can proceed.
Spline Test #
At this point, run SplineTest. If the robot successfully follows the spline, it’s a good indication that the previous steps were successful. Otherwise, try to ascertain the cause of the failure. Did the robot over/under-rotate? If so, check the track width. Did the robot travel too far/stop too short? If so, check the drive characterization. This is where knowledge of Road Runner becomes extremely helpful.
Follower PID #
Once SplineTest works well, you can run FollowerPIDTuner and tune the follower PID controllers. Typically only a P controller is required (on occasion a PD is justifiable). This should get the last 10% tracking accuracy.